Exercices Types - Exercice 2
25 min
45
Soit un repère du plan. On a placé les différents points dans le graphique ci-dessous :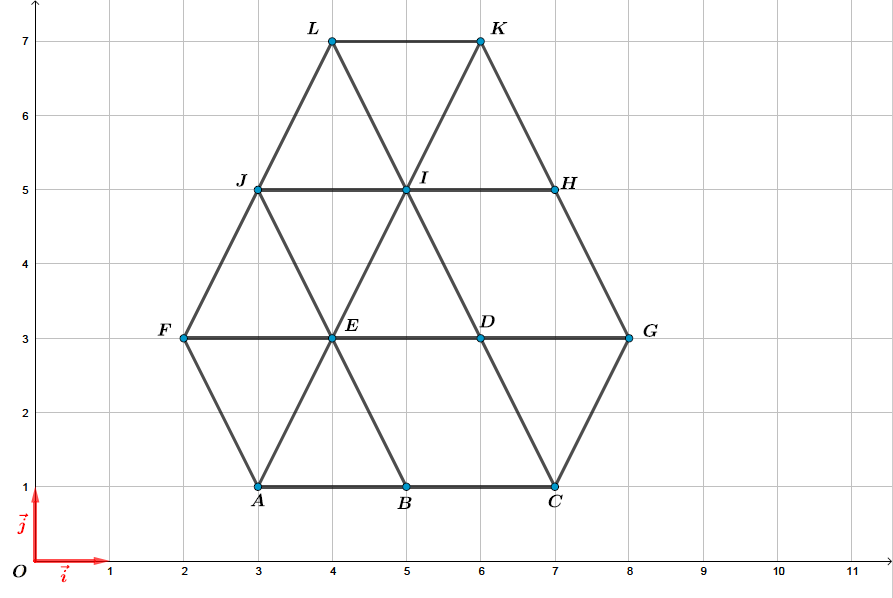
Question 1
Donner un vecteur opposé au vecteur et donner cette information en écriture mathématique.
Correction
Question 2
A partir de et . Calculer les coordonnées du vecteur puis sa norme.
Correction
Soit un repère orthonormal du plan et deux points et . La distance est donnée par la formule :
Ainsi :équivaut successivement à :
Question 3
Sachant que et .
Calculer les coordonnées du point . Le point est-il confondu avec un point de la figure? Préciser lequel?
Correction
Nous savons que et également que : . Finalement :
Il vient alors que :
On obtient alors deux équations à résoudre. Nous l'écrivons sous forme de système.
équivaut successivement à :
Les coordonnées du point sont alors qui est confondu avec le point .
Il vient alors que :
On obtient alors deux équations à résoudre. Nous l'écrivons sous forme de système.
équivaut successivement à :
Les coordonnées du point sont alors qui est confondu avec le point .
Question 4
Soit . Déterminer les coordonnées du point .
Correction
Il vient alors que :
On obtient alors deux équations à résoudre. Nous l'écrivons sous forme de système.
équivaut successivement à :
Les coordonnées du point sont
Question 5
Soit . Déterminer les coordonnées du point .
Correction
Il vient alors que :
On obtient alors deux équations à résoudre. Nous l'écrivons sous forme de système.
équivaut successivement à :
Les coordonnées du point sont
Signaler une erreur
Aide-nous à améliorer nos contenus en signalant les erreurs ou problèmes que tu penses avoir trouvés.