On note par K le corps des nombres réels R ou celui des nombres complexes C. On appelle polynôme à une indéterminée, notée X, à coefficients dans K, toute expression de la forme : k=0∑+∞akXk où (ak) est une suite d'éléments, dans K, tous nuls sauf un nombre fini de ces éléments qui sont appelés les coefficients du polynômes. On admet que X0=1. On a également : a0+k=1∑+∞akXk Deux polynômes sont eˊgaux si et seulement s'ils ont les mêmes coefficients. Ce qui fait que la somme précédente est finie. On note par P(X), ou P, cette somme finie. L'ensemble des polynômes, de l'indéterminée X, à coefficients dans K, se note K[X].
En considérant la situation dans laquelle seul le coefficient a0 est non nul, qui s'identifie à K, on constate que l'ensemble K[X] contient l'ensemble K. Donc on a : K⊂K[X] On appelle le polyno^menul, le polynôme dont tous les coefficients sont nuls. On le note simplement P=0. On appelle mono^me, tout polynôme dont tous les coefficients, sauf un, sont nuls. Un mono^me est donc de la forme akXk. On appelle degreˊ d'un polynôme P non nul le plus grand entier naturel n tel que an=0. On le note n=deg(P) ou d∘(P). Si deg(P)=n alors P(X)=a0+a1X+a2X2+⋯+anXn avec an=0. On note ceci : P(X)=k=0∑nakXk Le monôme anXn est appelé mono^medominant et an s'appelle le coefficientdominant Si an=1 alors le polynôme est dit unitaire ou normaliseˊ.
∢Important: Le degré du polynôme nul n'est pas défini. On appelle valuation d'un polynôme Pnonnul le plus petit entier naturel n tel que an=0. On note ceci par : val(P)=n.
Addition des polynômes
∢Deˊfinition: On pose P=k=0∑+∞akXk et Q=k=0∑+∞bkXk deux polynômes de K[X]. On appelle le polynôme somme, noté P+Q, le polynôme suivant : P+Q=k=0∑+∞(ak+bk)Xk Ce qui implique que : deg(P+Q)⩽max(deg(P);deg(Q)) On appelle lesymeˊtrique de P=k=0∑+∞akXk, pour l'addition, l′opposeˊ, et est noté −P. Et on a : −P=−k=0∑+∞akXk=k=0∑+∞(−ak)Xk
L'addition confère à l'ensemble des polynômes une structure de groupe abélien. On note (K[X];+) ce groupe abélien.
Multiplication des polynômes
∢Deˊfinition: On pose P=k=0∑+∞akXk et Q=k=0∑+∞bkXk deux polynômes de K[X]. On appelle le polynôme produit, noté PQ=P×Q, le polynôme suivant : PQ=k=0∑+∞ckXk Avec : ck=i=0∑nak−ibi=akb0+ak−1b1+ak−2b2+⋯+a2bk−2+a1bk−1+a0bk Ce qui implique que : deg(PQ)=deg(P)+deg(Q) La multiplication des polynômes est commutative, associative, distributive par rapport à l'addition et admet le polynôme P=1 comme élément neutre.
L'addition et la multiplication confère à l'ensemble des polynômes une structure d'anneau commutatif intègre. On note (K[X];+;×) cet anneau commutatif intègre. L'ensemble K[X] n'est pas un corps.
Multiplication par un scalaire
∢Deˊfinition: On pose P=k=0∑+∞akXk un polynôme de K[X], et λ un nombre réel. On pose : λP=λk=0∑+∞akXk=k=0∑+∞(λak)Xk Si on pose λ et μ deux scalaire de K, et P et Q deux polynômes de K[X]. On a les quatre propriétés suivantes : 1−λ(μP)=(λμ)P 2−(λ+μ)P=λP+μP 3−1P=P 4−λ(P+Q)=λP+λQ De ces quatre propriétés, on en déduit que l'ensemble des polynômes, relativement à l'addition et la multiplication par un scalaire, à une structure d'espacevectoriel sur K (souvent noté en abrégé K−ev). D'ailleurs, les n+1(n∈N) monômes X0=1, X1=1, X2, X3, ... , Xn constituent une base de dimension n+1 pour l'espace vectoriel des polynômes de degré au plus égal à n. Autrement dit, il est possible d'écrire de manieˋreunique, juste à l'aide des monômes X0=1, X1=1, X2, X3, ... , Xn, n'importe quel polynôme de degré maximal n.
Polynôme dérivé
∢Deˊfinition: On appelle polyno^medeˊriveˊ de P=k=0∑+∞akXk le polynôme, noté P′, suivant : P′=k=0∑+∞kakXk−1=k=1∑+∞kakXk−1 Comme le premier terme de cette (première) somme est nul (cas k=0). Il est possible de réindicer cette somme de manière à ne plus avoir le premier terme nul. On a alors : P′=k=0∑+∞(k+1)ak+1Xk Et on a les dix propriétés suivantes : 1−(P+Q)′=P′+Q′ 1−(P−Q)′=P′−Q′ 2−(λP)′=λP′ 3−1P=P 4−(PQ)′=P′Q+PQ′ 5−(QP)′=Q2P′Q−PQ′ 6−(Pn)′=nP′Pn−1 7−P(0)=P 8−P(1)=P′ 9−P(2)=(P(1))′=(P′)′=P′′ 10−(P(n))′=P(n+1)
Polynôme Mac Laurin et Taylor
∢Deˊfinition: Un polynôme non nul P de degré n s'écrit sous la forme : P=k=0∑nakXk=a0+a1X+a2X2+a3X3+⋯+anXn⟹P(0)=a0 Donc : P′=k=1∑nkakXk−1=a1+2a2X+3a3X2+⋯+nanXn−1⟹P′(0)=a1 Puis : P′′=k=1∑nk(k−1)akXk−2=2a2+6a3X+⋯+n(n−1)anXn−1⟹P′′(0)=2a2=1×2a2 D'où : P′′′=k=1∑nk(k−1)(k−2)akXk−3=6a3+⋯+n(n−1)(n−2)anXn−2⟹P′′′(0)=6a3=1×2×3a3 On constate alors que, de proche en proche, nous obtenons : P(n)(0)=1×2×3⋯×nan=n!an On a donc : an=n!P(n)(0) En se souvenant que dans le cas n=0 on a a0=0!P(0)(0)=1P(0)=P(0), on peut donc écrire le polynômes P sous la forme suivante : P=k=0∑nakXk=k=0∑nk!P(k)(0)Xk=P(0)+P′(0)X+2P′′(0)X2+6P′′′(0)X3+⋯+n!P(n)(0)Xn Finalement, on obtient laformuledeMacLaurin (Colin MacLaurin, mathématicien écossais, 1698-1746) : P(X)=P(0)+P′(0)X+2!1P′′(0)X2+3!1P′′′(0)X3+⋯+n!1P(n)(0)Xn Soit h∈K. Posons Q(X)=P(X+h). La formuledeMacLaurin nous donne alors : Q(X)=Q(0)+Q′(0)X+2!1Q′′(0)X2+3!1Q′′′(0)X3+⋯+n!1Q(n)(0)Xn On a alors, par dérivation composée : Q′(X)=(P(X+h))′=(X+h)′P′(X+h)=1×P′(X+h)=P′(X+h) D'où : Q′(0)=P′(0+h)=P′(h) On trouve alors que Q(n)(0)=P(n)(h). De plus, Q(0)=P(0+h)=P(h). La formuledeMacLaurin nous donne alors : P(X+h)=P(h)+P′(h)X+2!1P′′(h)X2+3!1P′′′(h)X3+⋯+n!1P(n)(h)Xn Il s'agit de laformuledeTaylor (Brook Taylor, mathématicien anglais, 1685-1731)
De la formule précédente, on tire que : P(X+h)−P(h)=P′(h)X+2!1P′′(h)X2+3!1P′′′(h)X3+⋯+n!1P(n)(h)Xn Soit encore : XP(X+h)−P(h)=P′(h)+2!1P′′(h)X+3!1P′′′(h)X2+⋯+n!1P(n)(h)Xn−1 D'où : X⟶0limXP(X+h)−P(h)=X⟶0lim(P′(h)+2!1P′′(h)X+3!1P′′′(h)X2+⋯+n!1P(n)(h)Xn−1) Soit : X⟶0limXP(X+h)−P(h)=X⟶0limP′(h)+X⟶0lim(2!1P′′(h)X+3!1P′′′(h)X2+⋯+n!1P(n)(h)Xn−1) Or, P′(h)∈K, donc X⟶0limP′(h)=P′(h). Ce qui nous donne immédiatement : X⟶0limXP(X+h)−P(h)=P′(h)+X⟶0lim(2!1P′′(h)X+3!1P′′′(h)X2+⋯+n!1P(n)(h)Xn−1) De plus, on a X⟶0lim(2!1P′′(h)X+3!1P′′′(h)X2+⋯+n!1P(n)(h)Xn−1)=0. Ainsi, on obtient : X⟶0limXP(X+h)−P(h)=P′(h) On reconnais la formule qui sert de définition de dérivée de P en h, usuellement écrite sous la forme : P′(h)=X⟶0limXP(h+X)−P(h) Ceci montre la cohérence de l'ensemble des développements.
Multiplicité d'une racine d'un polynôme
Définition
∢Deˊfinition: Soit r∈K. On appelle racine d'un polynôme P, le scalaire r qui vérifie P(r)=0. On appelle ordredemultipliciteˊdelaraciner, de P=0, de degré n∈N, le plus grand nombre entier naturel p⩽n qui rend le polynôme (non nul) Pdivisible par (X−r)p. Autrement écrit : P(X)∣∣(X−r)p⟺(X−r)pP(X)=Q(X)∈K[X]deg(Q)=n−p Dans laformuledeTaylor de P=0, posons h=r et X=X−r. Dans ce cas : X+h=X−r+h=X−r+r=X On a alors : P(X)=P(r)+P′(r)(X−r)+2!1P′′(r)(X−r)2+3!1P′′′(r)(X−r)3+⋯+n!1P(n)(r)(X−r)n Dans cette expression, faisons clairement apparaitre le nombre entier naturel p⩽n. On a alors : P(X)=+P(r)+P′(r)(X−r)+2!1P′′(r)(X−r)2+3!1P′′′(r)(X−r)3+⋯+(p−1)!1P(p−1)(r)(X−r)p−1p!1P(p)(r)(X−r)p+(p+1)!1P(p+1)(r)(X−r)p+1+⋯+n!1P(n)(r)(X−r)n Soit encore : P(X)=+P(r)+P′(r)(X−r)+2!1P′′(r)(X−r)2+3!1P′′′(r)(X−r)3+⋯+(p−1)!1P(p−1)(r)(X−r)p−1(X−r)p(p!1P(p)(r)+(p+1)!1P(p+1)(r)(X−r)+⋯+n!1P(n)(r)(X−r)n−p) Notons par R(X) la première ligne du développement précédent de P(X). Donc : P(X)=+R(X)(X−r)p(p!1P(p)(r)+(p+1)!1P(p+1)(r)(X−r)+⋯+n!1P(n)(r)(X−r)n−p) Avec : R(X)=P(r)+P′(r)(X−r)+2!1P′′(r)(X−r)2+3!1P′′′(r)(X−r)3+⋯+(p−1)!1P(p−1)(r)(X−r)p−1 Supposons maintenant que r soit une racine d'ordre p du polynôme P. Ainsi le polynôme P est divisible par les tous les termes suivants : (X−r), (X−r)2, (X−r)3, ⋯ , (X−r)p−1 et (X−r)p. De plus, on a bien évidemment P(r)=0. Dans ce cas, avec Q(X)∈K[X], on a (X−r)pP(X)=Q(X)∈K[X] Soit : (X−r)pR(X)+(X−r)p(p!1P(p)(r)+(p+1)!1P(p+1)(r)(X−r)+⋯+n!1P(n)(r)(X−r)n−p)=Q(X)∈K[X] Soit encore : (X−r)pR(X)+p!1P(p)(r)+(p+1)!1P(p+1)(r)(X−r)+⋯+n!1P(n)(r)(X−r)n−p=Q(X)∈K[X] On doit donc avoir obligatoirement R(X)=0. Nous pouvons imaginer que l'indéterminée de R ne soit pas X mais X−r. Posons donc X−r=T, et de fait : R(T)=P(r)+P′(r)T+2!1P′′(r)T2+3!1P′′′(r)T3+⋯+(p−1)!1P(p−1)(r)Tp−1 A savoir : 0=P(r)+P′(r)T+2!1P′′(r)T2+3!1P′′′(r)T3+⋯+(p−1)!1P(p−1)(r)Tp−1 Or, rappelons que P(r)=0 car, par hypothèse, r est une racine du polynôme P. Donc : 0=0+P′(r)T+2!1P′′(r)T2+3!1P′′′(r)T3+⋯+(p−1)!1P(p−1)(r)Tp−1 Soit : P′(r)T+2!1P′′(r)T2+3!1P′′′(r)T3+⋯+(p−1)!1P(p−1)(r)Tp−1=0 Ceci implique donc que P′(r)=P′′(r)=P′′′(r)=⋯=P(p−1)(r)=0 Finalement, nous arrivons à la conclusion suivante : Sirestuneracined′ordrep⩽ndupolyno^mePalorsP(r)=P′(r)=⋯=P(p−1)(r)=0etP(p)(r)=0
Division euclidienne de deux polynômes
Le théorème de la division euclidienne de deux polynômes
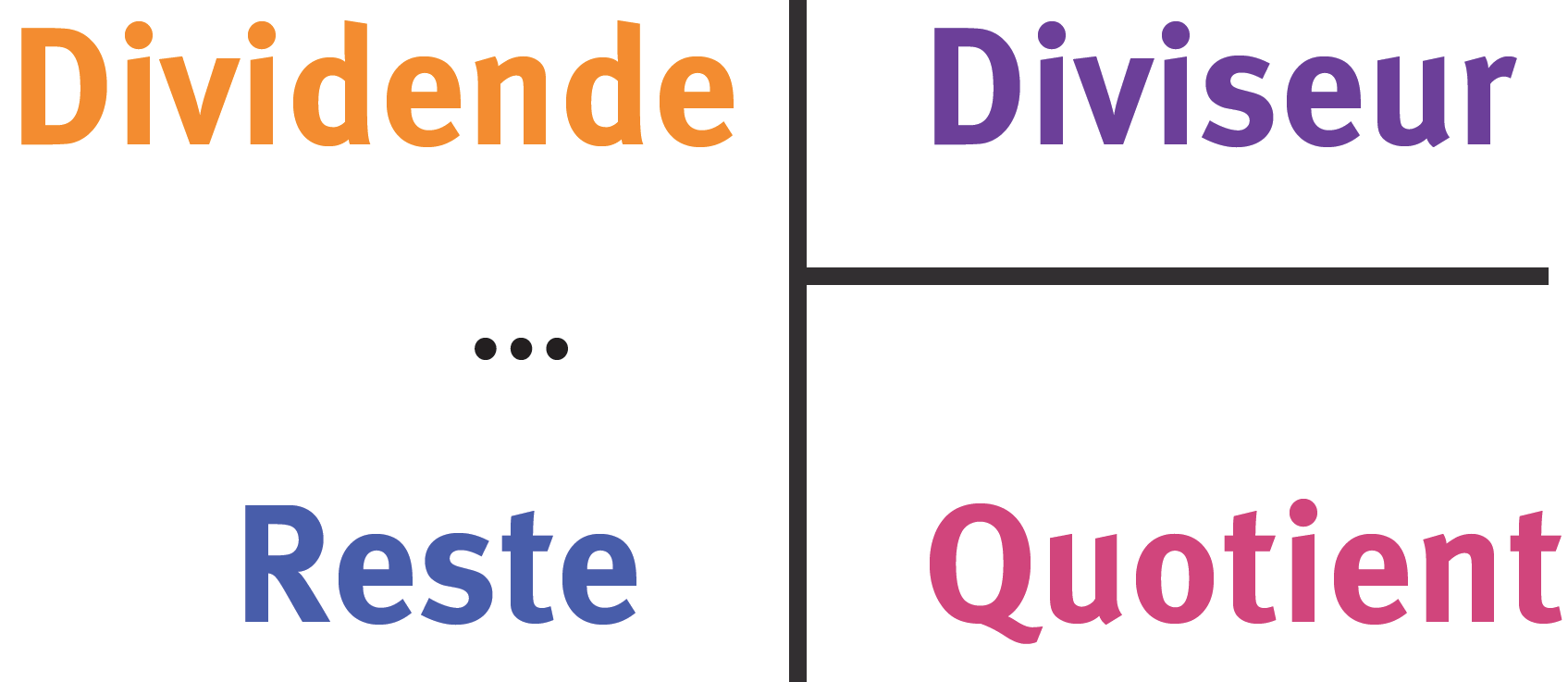
Soient A et B deux polynômes à coefficients dans K, avec B non nul, il existe ununique couple (Q;R) tel que : A=BQ+R Avec le degré de R est strictementpluspetit que celui de B. Le polynôme A est le dividende et le polynôme B est le diviseur. Le polynôme Q est le quotient et le polynôme R est le reste. On retiendra :
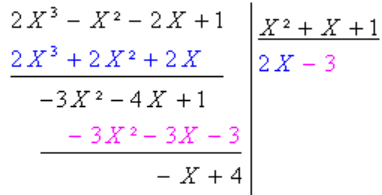
Lorsque le reste R=0, on dit que A est divisible par B ou, de manière équivalente, que BdiviseA. On note ceci : A∣∣B. Bien souvent, dans la pratique, on a deg(A)⩾deg(B). Dans ce cas, on obtient séquence type que nous allons illustrer. Pour l'exécution d'une division euclidienne, on écrit les deux polynômes A et B selon les puissances décroissantes. Donc on écrit les deux polynômes A et B en commençant par leur monôme dominant respectif. Rappelons que l'on stoppe la séquence calculatoire lorsqu'à gauche, à l'issue de la soustraction (donc sous un trait horizontal), le degré du polynôme obtenu est inférieur à celui du diviseur. Posons A=2X3−X2−2X+1 et B=X2+X+1. Dans ce cas, on a la séquence calculatoire suivante :
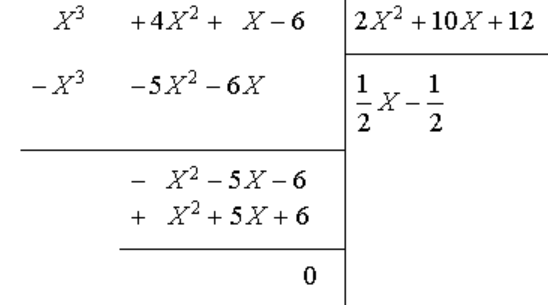
Et on a : 2X3−X2−2X+1=(X2+X+1)×(2X−3)+(−X+4) Le quotient est Q=2X−3 et le reste est R=−X+4. Illustrons maintenant la situation dans laquelle le reste est nul, c'est-à-dire le cas pour lequel B divise A (le diviseur divise le dividende, ou encore le dividende est divisible par le diviseur). Posons A=X3+4X2+X−6 et B=2X2+10X+12. Dans ce cas, on a la séquence calculatoire suivante :
Et on a : X3+4X2+X−6=(2X2+10X+12)×(21X−21)+(0) Le quotient est Q=21X−21 et le reste est R=0.
Dans le dividiende, lorsqu'un coefficient (se trouvant devant un terme Xi,i∈[[1;n]]) est nul, on l'indique clairement dans la division euclidienne en écrivant 0Xi.
Division selon les puissances croissantes de deux polynômes
Définition
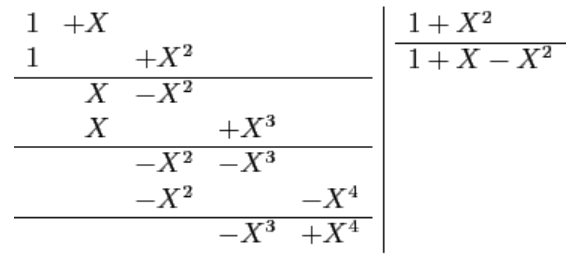
Il est également possible d'écrire les deux polynômes A et B selon les puissances croissantes de leur indéterminée. Cette technique est utile pour effectuer des décomposition en éléments simples de fractions rationnelles polynomiales. On considère les deux polynômes non nul A et B suivants : {AB==a0+a1X+⋯+anXnb0+b1X+⋯+bnXn Avec b0=0, autrement dit val(B)=0. Dans ce cas, pour tout nombre entier naturel m, il existe un couple unique de polynôme (Q;R), tel que deg(Q)⩽m, et qui permet d'écrire : A=BQ+Xm+1R. Le polynôme Q s'appelle le quotient et le polynôme Xm+1R s'appelle le reste de la division suivant les puissances croissantes de A et Baˋl′ordrem. Si le reste de la division suivant les puissances croissantes de A et B est nul, à un certain moment, alors A est divisible par B. Contrairement à la division euclidienne, on peut la continuer indéfiniment : on ne s'arrête que quand l'ordre désiré est atteint. Par exemple, pour diviser A=X+1 par B=X2+1, à l'ordre 2, on écrit :
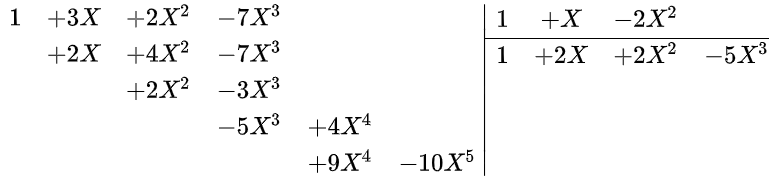
Ainsi, on écrit que : X+1=(1+X2)×(1+X−X2)+(−X3+X4) Soit encore : X+1=(1+X2)×(1+X−X2)+X3(−1+X) Finalement : X+1=(1+X2)×(1+X−X2)+X2+1(−1+X) On peut, par exemple, s'en servir pour décomposer la fraction rationnelle X3BA=X3(1+X2)1+X en éléments simples. En effet, nous avons : X3(1+X2)1+X=X3(1+X2)(1+X2)(1+X−X2)+X3(X−1)=X31+X21−X1+X2+1X−1 Illustrons cette méthode sur un autre exemple avec les polynômes suivants : A=1+3X+2X2−7X3 et B=1+X−2X2 On a alors, à l'ordre 3, la séquence calculatoire suivante :
Et on peut alors écrire : A1+3X+2X2−7X3=B(1+X−2X2)Q(1+2X+2X2−5X3)+X3+1R(9−10X)
Division par le terme X−a
La division de P par X−a s'écrit : P(X)=(X−a)Q(X)+R(X) Posons X=a, et dans ce cas, nous obtenons : P(a)=(a−a)Q(a)+R(a)⟺P(a)=R(a) Donc, on en déduit que : (P(X)∣∣(X−a))⟺P(a)=0 Si un polynôme P admet k∈N racines r1, r2, ⋯, rk (pas forcément distinctes entre elles, donc certaines peuvent être multiples) alors ce polynôme P peut se factoriser sous la forme suivante : P=(X−r1)(X−r2)⋯(X−rk)Q Avec Q∈K[X], et deg(Q)=deg(P)−k. Un polynôme P de K[X], de degré n∈N⋆ est dit scindeˊ sur K s'il se factorise sous la forme : P=an(X−r1)(X−r2)⋯(X−rn) où r1, r2, ⋯, rn sont les n racines de P et an est le coefficient dominant de P. Autrement dit, P est scindeˊ s'il s'écrit comme produit de polynômes de degré 1 à coefficients dans K. D'où : P(X)=k=1∏n(X−rk)
Le théorème de D'Alembert et Gauss
Historiquement, ce théorème est démontré rigoureusement par Gauss en 1815. Il s'agit en fait de sa deuxième preuve car la première (incomplète) était proposée dans sa thèse de Doctorat en 1799. Ce théorème est tellement important qu'il se nomme aujourd'hui : theˊoreˋmefondamentaldel′algeˋbre. Le théorème s'énonce ainsi : ♣Letheˊoreˋmefondamentaldel′algeˋbre: Toutpolyno^menonconstant,aˋcoefficientscomplexes,admetaumoinsuneracinecomplexe. Ce qui conduit facilement à l'énoncé suivant : Toutpolyno^mededegreˊn⩾1admetnracinesreˊellesoucomplexesdistinctesouconfondues.